随着人形机器人技术的快速发展,关节驱动系统的性能已成为决定产品灵活性与可靠性的核心要素。在各类关节应用场景中,从下肢支撑到上肢抓取,从大范围运动到精细操作,均对减速电机的轻量化、扭矩输出、负载能力及环境适应性提出了更高要求。近年来,摆线针轮结构的关节减速电机凭借其独特设计,逐渐成为行业关注的焦点,并在实际应用中展现出显著的技术优势。
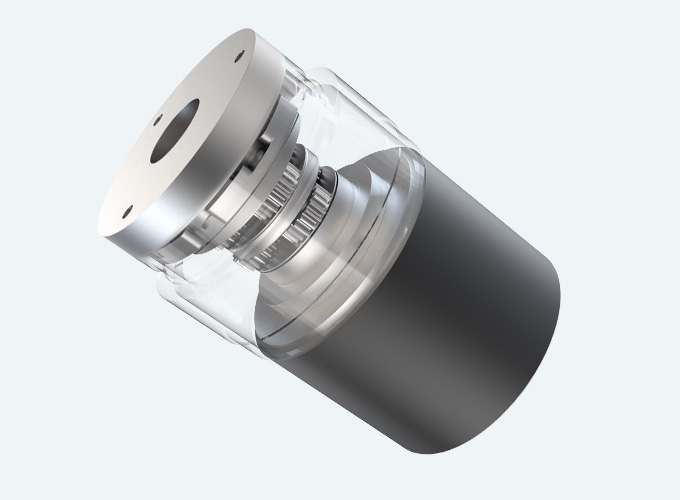
摆线针轮结构通过优化传动路径与接触方式,实现了动力传递效率与结构紧凑性的平衡。在轻量化设计方面,该技术通过材料科学创新与机械结构精简,大幅降低设备自重,同时保持关键部件的强度与耐用性。这一特性尤其适用于需要高运动频率和多自由度协同的关节场景,例如人形机器人的腿部关节需频繁承受动态载荷,轻量化设计可有效降低整体能耗并提升响应速度。
")
大扭矩与重负载能力是摆线针轮减速电机的另一核心优势。传统减速方案在应对突发冲击或过载工况时,易出现传动效率下降或机械磨损加剧的问题。而摆线针轮结构通过多点接触的应力分布设计,增强了传动的稳定性,使其能够在复杂负载条件下保持平稳输出。例如,在机器人肘关节和腕关节的快速摆动或急停动作中,该结构可显著减少振动和噪音,延长设备使用寿命。
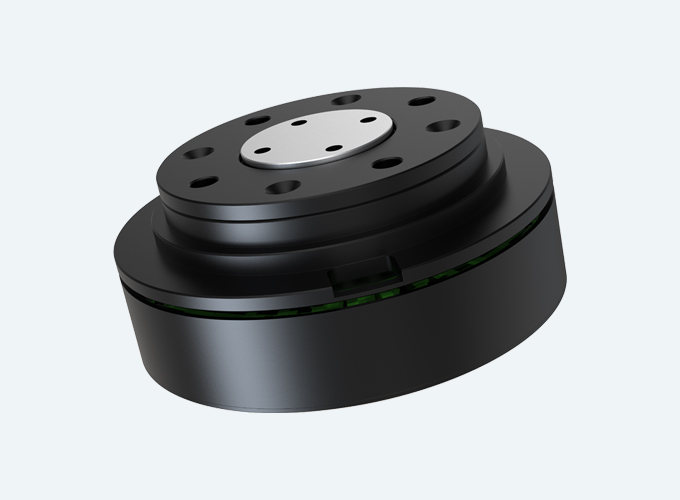
抗冲击性能的提升进一步拓宽了此类电机的应用场景。人形机器人在实际作业中可能面临跌落、碰撞等意外工况,这对关节部件的结构强度提出了严苛考验。摆线针轮减速电机通过强化关键部件的一体化设计,增强了整体刚性,同时结合缓冲材料的创新应用,能够有效吸收外部冲击能量,保障设备在极端环境下的可靠性。
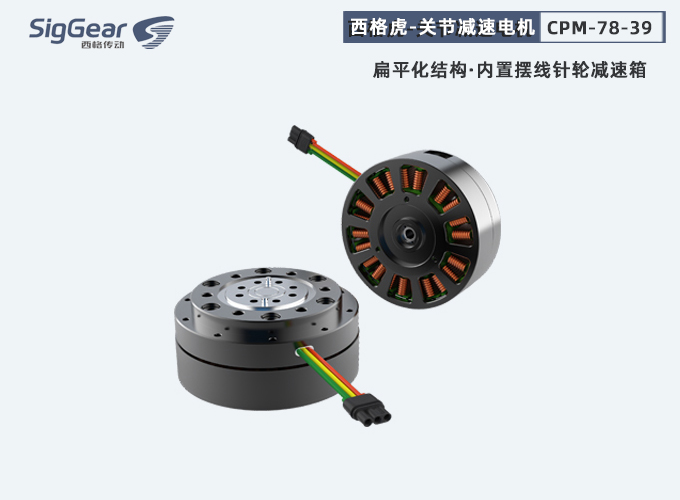
值得注意的是,摆线针轮结构长期面临反驱力过大的技术痛点,这可能导致关节回程阻力增加,影响运动精度与能效。针对这一难题,西格传动研发团队经过特殊设计通过改进齿形参数等方案,优化了传动系统的逆向摩擦特性,使设备在反向驱动时仍能保持低阻力和高灵敏度。这一突破不仅提升了人形机器人关节的操控流畅度,还为精细化操作如指关节抓取微小物体提供了技术支撑。
")
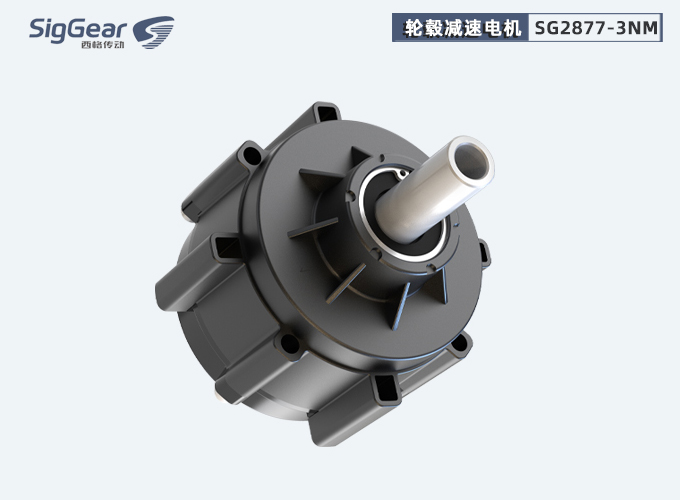
从下肢的行走平衡到上肢的精准操控,摆线针轮减速电机已逐步覆盖人形机器人全身关节的应用需求。在腿部关节中,其高扭矩特性可支持机器人在复杂地形中实现稳定步态;在手部关节中,轻量化与低反驱力的结合则能提升抓取动作的灵活性与准确性。此外,模块化设计理念的引入,使得该技术能够快速适配不同规格的关节单元,为产品迭代与功能扩展提供了便利。
随着智能制造与服务机器人市场的快速增长,关节驱动技术的革新正在加速人形机器人的产业化进程。摆线针轮减速电机的综合性能优势,不仅有助于提升机器人的运动能力与作业效率,还为医疗辅助、工业巡检、家庭服务等场景的落地提供了硬件保障。未来,通过持续优化材料工艺与智能控制算法,此类设备有望在动态响应、能效管理等方面实现进一步突破。
作为关节驱动领域的创新实践者,西格传动始终聚焦于技术研发与场景化应用,致力于为客户提供高可靠性、高适配度的解决方案。通过产学研深度合作与多学科技术融合,西格传动将持续推动人形机器人关节技术的升级,为智能机器人产业的发展注入新动能。
(本篇资讯源于西格传动小编收集整理,如有转载请注明出处:www.siggear.cn)