如果说灵巧手的指尖驱动,解决的是具身智能“触觉细腻度”的问题;那么肩、肘、腕等大关节的驱动,决定的则是具身智能“干活利不利索”的根本能力。
2025年以来,具身智能已跨越“能走能跑”的基础门槛,正式进入“能干重活、能扛冲击”的作业能力竞赛。特斯拉Optimus、Figure 02以及国内众多具身智能,正在从实验室走向车间产线。此时,一个十分硬核的工程问题便浮出水面:
如何在拳头大小的空间内,塞进一套既能输出大扭矩、又能承受频繁冲击、还要长期可靠的关节模组?
答案之一,就藏在西格传动推出的西格马SG-6010D扁平化行星关节模组里。
具身智能的大关节(肩、肘、腕、髋)面临的挑战,与灵巧手指关节截然不同,可以归结为三个字:“重、刚、稳”。
▶重:关节要能举起重物,这意味着扭矩必须足够大。
▶刚:在负载扰动或外力冲击下,关节不能产生过大弹性变形,否则精度全无。
▶稳:在连续数小时的高负荷作业中,关节不能过热、不能磨损过快、不能失效。
谐波减速器精度高、体积小巧,却天生抗冲击能力偏弱,瞬间过载易导致柔轮变形、损毁。摆线针轮减速器抗冲击表现出色,但整机尺寸普遍偏大。反观行星减速器,结构简单、刚性扎实,能在紧凑的关节空间里发挥出出色的扭矩密度。
大关节的驱动选型,本质上是在与“体积-扭矩-刚度”的不可能三角博弈。
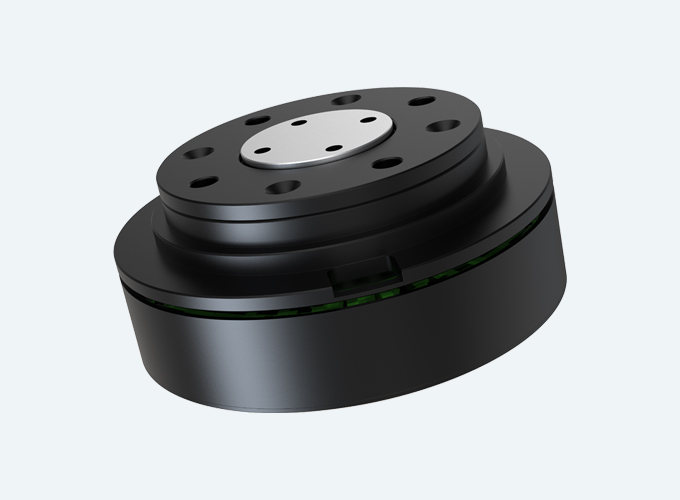
西格马SG-6010D行星关节模组,外径80mm、厚度仅58.77mm,这个数字意味着什么?
它比一罐标准易拉罐略粗,但高度不到其三分之一。这种“扁平化”形态,正是为具身智能关节的集成结构量身定制,可以直接嵌入肩、肘、腕的关节盘内,而不额外增加臂展长度。
但真正让它脱颖而出的,不是尺寸本身,而是80mm躯壳内爆发的力量密度。
也就是说,这个拳头大小的关节,在额定状态下可持续输出相当于“1.6公斤力•米”的扭矩;在瞬间爆发时,能输出“5公斤力•米”,足以让具身智能的小臂稳稳托起一袋25公斤的物料,或抵抗装配过程中突如其来的反向冲击。
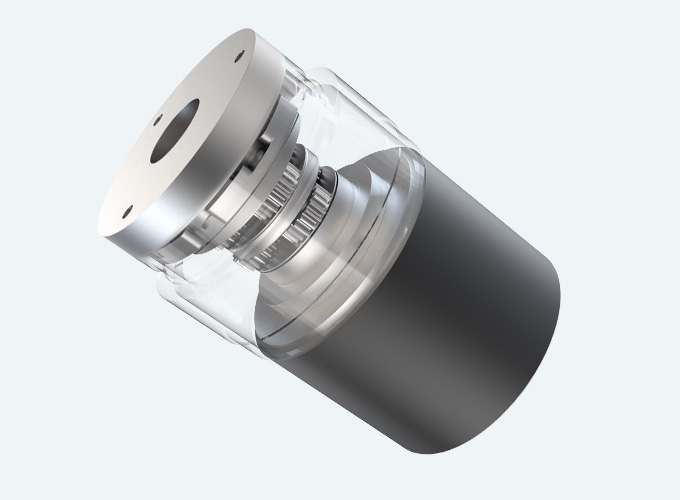
西格马SG-6010D采用二级行星传动结构,这个选择背后是严谨的工程权衡:
▶一级行星:减速比通常小于10,扭矩放大有限,适合轻载、高速场景。
▶二级行星:减速比可达15~30区间(SG-6010D为28.13),两级行星轮系分摊载荷,齿面接触应力降低,抗冲击能力显著提升。
▶三级行星:减速比更大,但轴向长度显著增加,且效率逐级衰减。
在80*58.77mm尺寸的空间约束下,二级行星成为“扭矩密度”与“紧凑性”的最优解。
更重要的是,金属材质的齿轮与壳体,保证了长期运行中背隙的稳定性,这对于需要反复定位、轨迹复现的具身智能关节而言,是精度寿命的核心指标。
减速比28.13是一个蕴含巧思的参数,这样的非整数速比,使得齿面接触点不断循环错位,磨损更均匀,寿命更长,西格马SG-6010D的设计不仅关注“能不能转”,更关注“能不能长期稳定地转”。
在具身智能关节的实际工况中,启停、加减速、正反转交替是常态,持续高速运转反而罕见。西格马SG-6010D将额定转速设定在100 RPM,是为了确保在16 Nm额定扭矩输出时,电机与齿轮箱仍处于热平衡最优区间。
这意味着用户可以长时间、全扭矩运行,而不必担心过热降额或润滑失效。50 Nm的峰值扭矩则提供了充足的瞬时过载裕度,从容应对装配卡阻、外力冲击等异常工况。
具身智能的终极目标,是实现环境精准感知与各类作业高效落地,而高性能关节正是实现这一切的核心支撑。
SG-6010D跳出常规标准产品的定位,而是精准瞄准“空间利用”与“硬核重载”两大核心需求,用自身的高性能,回答了在方寸之间,也能释放强劲动力的问题。
当一颗关节模组能同时满足“小体积、高刚性、抗冲击、长寿命”时,具身智能离真正走进车间、仓库与家庭,又近了一大步。







")
")
