
——微型传动,正在悄悄撑起具身智能世界的“骨架”。
当前,具身智能正从实验室走向小批量量产,灵巧手指关节、关节模组等成为供应链中最关键的“卡脖子”环节。而这类场景对传动部件的核心诉求出奇一致:体积要小、输出要稳、寿命要长。
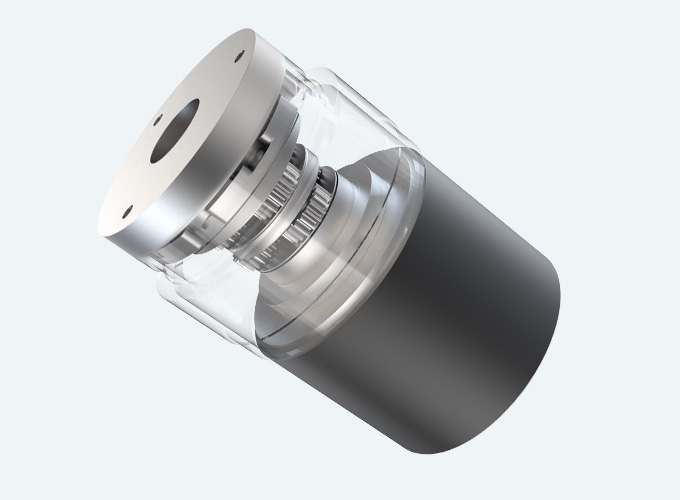
在这三个维度上,西格传动SG-PG10这款外径仅10mm的行星结构减速箱,恰好卡在了这个需求的区间。
")
一、10mm:不是更小,而是刚好
在灵巧手指关节空间里,外径10mm是一个经过工程权衡后的尺寸——它足够小,能塞进绝大多数仿人手指结构;同时又不至于太小,以至于牺牲齿轮模数和壁厚刚性。换句话说,这不是一味的微型化,而是“可用尺度下的最优解”。
微型化的目标不是尺寸的无限压缩,而是在受限空间中实现性能的最优解。外径10mm这一规格,对于灵巧手指关节而言,恰恰是结构设计与动力输出平衡后的“尺寸”——不会因过小而牺牲强度,也不会因过大而侵占布局空间。
二、尺寸与负载:小体积里的“力量弹性”
SG-PG10的产品高度在10.25mm至18.5mm之间可调,而这个高度变化,直接对应着1.3–2Kgf·cm的额定负载和2.6–4Kgf·cm的瞬间允许负载。
换句话说,同一颗齿轮箱,通过改变厚度,就能从“轻触按键”切换到“稳定夹持”。对于整机设计而言,这意味着可以在不更换结构的前提下,用一个平台适配多种力控需求。
三、多级减速:一个关节的完整力量谱系
具身智能手指在抓取不同物体时,需要的力矩差异很大,捏一颗螺丝,与按下某个按键,对驱动力的要求完全不同。
SG-PG10 通过不同减速级数的配置,可以实现力量上的灵活覆盖:
1、低减速比:适合快速、精细的动作,如轻触、复位。
2、高减速比:适合夹持、自锁或需要较高输出力矩的场景。
3、最大减速比 + 最高的瞬间负载能力:可以应对小型夹爪夹住轻量零件、微型机械臂短时承受反冲力等工况。
同一颗齿轮箱,搭配不同电机、不同减速级数,就能覆盖从“轻捏”到“稳夹”的完整力控区间。
这意味着具身智能可以在一个标准化平台上灵活调配,大大降低微型关节的开发复杂度。
四、机加工艺:为什么其他材料齿轮在这类场景中不够用
微型减速箱的齿轮工艺通常有三条路:粉末冶金、注塑、机加。
●粉末冶金:成本适中,精度尚可,适用于中大批量、负载不高的场景。
●注塑:成本最低,但齿面强度有限,且长期使用后背隙明显扩大。
●机加:成本最高,但精度最高,且金属材质的疲劳寿命远优于前两者。
SG-PG10选择机加工艺,实际上是在长期可靠性与单件成本之间选择了前者。
在灵巧手的高频使用场景中,注塑齿轮可能在3-6个月内出现明显的背隙扩大或齿面磨损,导致力控失准。而机加工艺配合适当的热处理与润滑,可以将这个周期延长至2-3年。对于具身智能的灵巧手指关节而言,这个差异直接决定了产品的全生命周期成本。
五、从参数到适用,是谁真正需要这款减速箱
✅️灵巧手指关节
自然抓握动作、可承受轻度冲击、小体积——宽速比适配不同抓握逻辑,额定负载覆盖日常物品,实现精准动作控制。
✅️医疗器械:
高精度、高稳定性、低背隙、低噪音——小于1.5°背隙保障抓握稳定性,机加金属齿保证长期重复精度。
✅️低空经济:
高刚性、轻量化、长期可靠性——机加工艺适应复杂环境,提升动力输出与续航表现。
六、真正价值:不是一颗齿轮箱,而是一套“尺度逻辑”
灵巧手指关节本质上是对“微型化”要求极高的场景——轻、稳、小、精、够力,而SG-PG10同时满足这些需求,说明微型传动行业正在进入一个新的临界点:不再只是“把小零件做小”,而是在毫米级尺度上,同时保证精度、负载、寿命与成本,这意味着供应链可以更简化,集成效率更高,可靠性有了可预期的保障。
一颗10mm的齿轮箱,也许不会出现在产品宣传页上,但它撑起的,恰恰是具身智能真正走向“灵巧”的那一步。
(本篇资讯源于西格传动小编收集整理,如有转载请注明出处:www.siggear.cn)





西格传动 · 国家级高新技术企业

