在精密医疗器械与工业自动化装备的技术演进中,如何将微型电机的动力转化为末端执行器的精确动作,是传动链路的核心命题。尤其在微创器械、康复设备和精密加工主轴等场景,传动系统需要在极限体积内实现力量与精度的统一。
如果说工业机器人关节追求的是功率密度,那么面向精密操作场景的微型减速器,其核心诉求则是小、精、稳,即体积要小,控制要精,运行要稳。
西格传动推出的SG-PG16行星齿轮箱,以16mm的外径为原点,通过四级减速架构的划分,为医疗器械及工业自动化领域的高精度末端执行,提供了一套清晰的“力量分级”逻辑。
.jpg")
一、尺度与力量
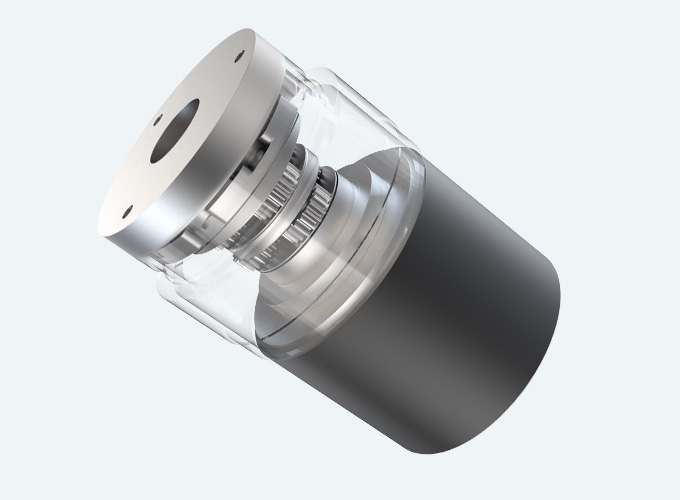
SG-PG16行星齿轮箱的外径为16mm,产品高度根据级数不同在17.55mm~30.45mm之间。这一尺寸规格使其能够被集成于精密医疗夹具或小型自动化模组的关节空间内,作为驱动电机与执行机构之间的核心传动环节。
额定允许负载范围为4~9 Kgf-cm,瞬间允许负载可达8~26 Kgf-cm。这表明,SG-PG16不仅能够应对常规夹持或进给操作的负载需求,其瞬时过载能力也为医疗器械在遭遇意外阻力或需要输出更大夹紧力时,提供了充足的安全裕度。
二、背隙控制与刚性
对于需要完成切割、缝合、精密装配或检测等动作的医疗器械与工业自动化装备而言,动作的精度与重复性至关重要。传动链中的任何微小间隙,都会在力反馈和位置控制中引入不确定性,导致操作误差。
SG-PG16的背隙控制在1.5°以下,这在微型行星齿轮箱领域属于一个兼顾精度与工程可实现性的水平。较小的背隙意味着动力传递更直接,动作响应更迅速,为后续的力控算法提供了更可靠的机械基础。
而且SG-PG16在16mm的直径约束下,通过其金属材质齿轮与壳体的机加工艺,构建了扎实的刚性基础,这对于需要反复定位、轨迹复现的精密操作而言,是长期稳定运行的关键。
三、多级数与速比
不同的医疗器械执行机构对速度和力量的需求是梯度分布的。SG-PG16提供了1~4级的灵活级数选择,减速比范围覆盖3.85~459.5。
在保持接口统一的前提下,通过选择不同级数的齿轮箱,来匹配不同末端执行器的扭矩和速度需求。比如,需要大夹持力的持针器或重型夹具可选择多级、大减速比方案以获取更强抓力,而需要快速响应的镜头调焦或轻载夹爪则可选用单级方案以追求更高的动作速度。
.jpg")
四、结语
随着医疗器械微创操作、工业自动化精密作业对运行精细度与负载稳定性的要求同步提升,微型行星齿轮箱的角色正从“动力执行部件”,向高精度、可感知的“精密控制交互核心”演进。
西格传动SG-PG16行星齿轮箱,本质上是一套适配医疗器械、工业自动化场景的精密末端动力分级解决方案。产品摒弃单一通用的粗放式动力输出方案,通过对减速级数、本体长度、传动速比与负载能力的精细化匹配组合,精准界定设备从“轻柔微调”到“稳定重载”的全维度动力输出梯度。
无论是医疗微创设备的轻柔精准操作,还是工业自动化装备的精密传动作业,都能依托分级化动力输出,兼顾作业精度与运行稳定性,满足高端精密设备对动力控制的严苛要求。
当齿轮的每一次啮合都能被精确控制与感知,医疗器械与工业自动化装备的末端作业便拥有了精细化的力控能力。这不仅关乎动力输出的大小,更关乎作业过程中精准可控的力度分寸,让精密工况下的柔性操作、精准作业成为可能。
(本篇资讯源于西格传动小编收集整理,如有转载请注明出处:www.siggear.cn)